
濟(jì)南恒信新能源汽車(chē)教學(xué)設(shè)備
一站式采購(gòu)加工 運(yùn)營(yíng)18年 質(zhì)量保證

全國(guó)客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
價(jià)格:1.18-4.3萬(wàn)/臺(tái)
功能:無(wú)人駕駛工況模擬控制
產(chǎn)品型號(hào):hx-wrjagkmnkzfzsyt-17*65
廠家定制:加工定制
起訂量:1臺(tái)起
作者:汽車(chē)教具 來(lái)源:無(wú)人駕駛汽車(chē)教學(xué)設(shè)備
發(fā)布時(shí)間:2020-03-24 15:49:03 閱讀次數(shù):145
電話:13455126350
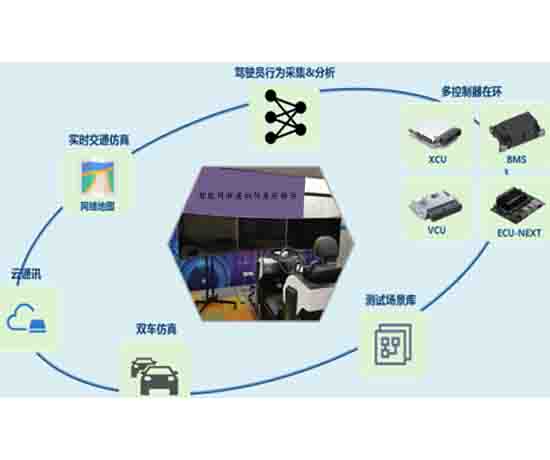
無(wú)人駕駛汽車(chē)工況模擬控制仿真實(shí)驗(yàn)臺(tái)通過(guò)使用仿真軟件,可以檢查算法,也可以訓(xùn)練無(wú)人駕駛車(chē)輛在不同場(chǎng)景中感知和做出決策,下面小編為您詳細(xì)介紹!
(1)車(chē)輛模擬系統(tǒng):電動(dòng)轉(zhuǎn)向系統(tǒng);車(chē)輛驅(qū)動(dòng)系統(tǒng);制動(dòng)系統(tǒng);
(2)上位機(jī)控制系統(tǒng):控制卡和控制軟件;
上位機(jī)可以設(shè)定參數(shù)控制車(chē)輛的啟動(dòng)、前進(jìn)、倒車(chē)、加速、減速、制動(dòng)和轉(zhuǎn)向操作。
1.制動(dòng)系統(tǒng):液壓制動(dòng)系統(tǒng)套件,可通過(guò)上位機(jī)控制制動(dòng)。
2.電動(dòng)轉(zhuǎn)向系統(tǒng):包括扭矩傳感器、動(dòng)力電機(jī)、角度傳感器等。轉(zhuǎn)向速度和角度可由計(jì)算機(jī)控制。
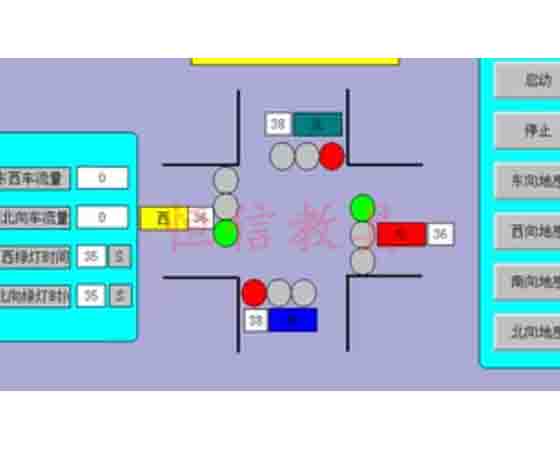
3.上位機(jī)控制軟件:上位機(jī)軟件可以控制轉(zhuǎn)向角度、前進(jìn)和后退、加速和減速等工況,并能實(shí)時(shí)監(jiān)控和顯示車(chē)輛狀態(tài)。
4.驅(qū)動(dòng)系統(tǒng):包括車(chē)輪、驅(qū)動(dòng)橋、驅(qū)動(dòng)電機(jī)、控制器、換擋機(jī)構(gòu)、油門(mén)踏板等。計(jì)算機(jī)可以控制前進(jìn)、后退、加速、減速等。
該實(shí)驗(yàn)臺(tái)采用二自由度車(chē)輛模型簡(jiǎn)化無(wú)人駕駛車(chē)輛的橫向運(yùn)動(dòng)模型,對(duì)于簡(jiǎn)化模型,引入滑模控制,通過(guò)控制輸入(前輪角度)來(lái)最小化預(yù)瞄點(diǎn)的航向偏差和橫向距離偏差。同時(shí),考慮到滑模控制中的抖振現(xiàn)象會(huì)影響整個(gè)控制的穩(wěn)定性,采用連續(xù)變化的雙曲正切函數(shù)代替符號(hào)函數(shù)。最后,通過(guò)CarSim和Simulink的聯(lián)合仿真,驗(yàn)證了該方法的可行性。
在無(wú)人駕駛汽車(chē)的測(cè)試中,有人在github上用活性氧動(dòng)能和Gazebo 8做了一個(gè)小豆蔻。車(chē)輛的油門(mén)、剎車(chē)、轉(zhuǎn)向和傳動(dòng)都是通過(guò)一個(gè)活性氧系統(tǒng)控制的。所有傳感器數(shù)據(jù)都通過(guò)ROS發(fā)布,并可通過(guò)RVIZ可視化。Gazebo功能用于集成現(xiàn)有模型和傳感器,以構(gòu)建城市模型和高速公路互動(dòng)場(chǎng)景。
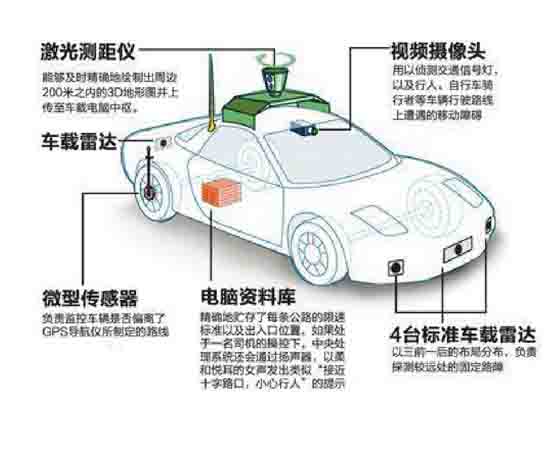
垃圾桶、交通錐和加油站都來(lái)自Gazebo模型基地。屋頂上安裝了一臺(tái)16線激光雷達(dá)、8個(gè)超聲波傳感器、4個(gè)攝像機(jī)和2個(gè)平面激光雷達(dá)。代碼可在Github上獲得。嘗試通過(guò)Nvidia-docker并從Docker Hub中提取osrt/car_demo。該平臺(tái)是基于C++開(kāi)發(fā)的,系統(tǒng)需要ROS+Ubuntu環(huán)境。
以上內(nèi)容就是介紹的無(wú)人駕駛工況模擬控制仿真實(shí)驗(yàn)臺(tái):http://tea818.com/xb-wr/607.html,希望對(duì)訂無(wú)人駕駛汽車(chē)教學(xué)設(shè)備的朋友們有所幫助,可能會(huì)出現(xiàn)介紹錯(cuò)誤,看到請(qǐng)馬上聯(lián)系我們改正,想了解其中更多內(nèi)容以及行情資訊,歡迎收藏本站,也可電話聯(lián)系我們索要設(shè)備的功能參數(shù)等,或者直接實(shí)地考察,也可電話微信溝通訂購(gòu)等!



添加微信
可微信咨詢(xún)
全國(guó)免費(fèi)服務(wù)熱線
134-5512-6350