濟南恒信新能源汽車教學設備
一站式采購加工 運營18年 質量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
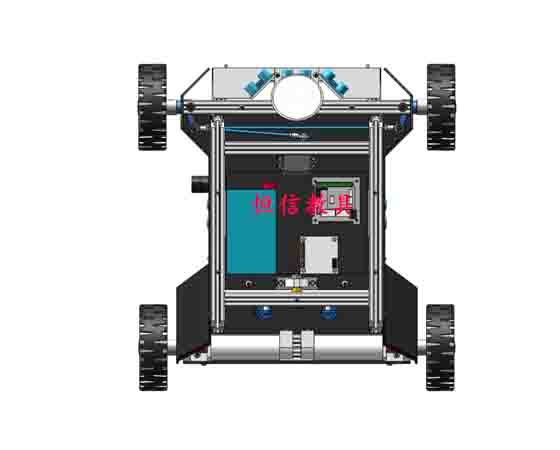
在 ROS 中,一般使用 rostopic 命令行工具、RViz 可視化工具、Python/C++ 腳本等方式對驅動輪進行控制。實現控制方式的不同,會有相應的驅動軟件包,如 diff_drive_controller、omni_drive_controller、mecanum_drive_controller 等。 ...[詳情]

ROS小汽車,全稱為“機器人操作系統小車”,是由操作系統ROS(Robot Operating System)作為驅動的智能交通工具,已被廣泛應用于無人駕駛汽車、自動駕駛船只等領域。 ...[詳情]
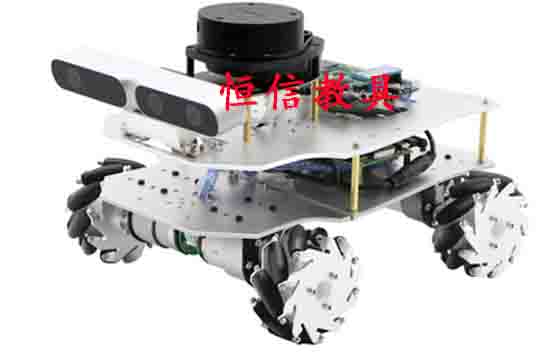
智能小車底盤ros機器人平預留ros2手柄接收插座,速度和轉向可由PS2手柄控制,無級調速可由搖桿實現。 ...[詳情]