濟南恒信新能源汽車教學設備
一站式采購加工 運營18年 質(zhì)量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
ROS (Robot Operating System) 是一種針對機器人的開源軟件平臺,旨在簡化機器人軟件開發(fā)者的工作。ROS 是一個分布式系統(tǒng),它被設計為由多個節(jié)點組成,每個節(jié)點運行自己的 C++/Python 代碼,并通過 ROS 中的通信機制相互交流。ROS 的發(fā)展過程和源代碼都是開放的,因此其不斷增長的用戶群體和提供的各種工具只是其中的一部分。
ROS 中驅(qū)輪是指機器人所配備的驅(qū)動輪,ROS 可以在機器人控制系統(tǒng)中完成對驅(qū)動輪的控制。
在 ROS 中,一般使用 rostopic 命令行工具、RViz 可視化工具、Python/C++ 腳本等方式對驅(qū)動輪進行控制。實現(xiàn)控制方式的不同,會有相應的驅(qū)動軟件包,如 diff_drive_controller、omni_drive_controller、mecanum_drive_controller 等。
其中,常用的差動控制驅(qū)動軟件包是 diff_drive_controller,它主要針對差分車型的驅(qū)動輪控制,并提供了多種不同的控制方式。
另外,移動機器人的控制通常需要實現(xiàn) SLAM(Simultaneous Localization and Mapping,同時定位與地圖構建),解決機器人在未知環(huán)境中的行動和探測。其中,激光雷達和 RGBD 相機是常用的 SLAM 傳感器,而 gazebo 是一個集成了 SLAM 模擬器的環(huán)境,ROS 中相應的驅(qū)動軟件包有 navigation 和 slam_gmapping。
ROS 中驅(qū)動輪的應用場景非常廣泛。下面列舉一些代表性的應用場景:
消防救援機器人:用于火災現(xiàn)場的搜救、水源獲取、火源撲滅等。
相比于其它傳統(tǒng)機器人開發(fā)框架,ROS 中驅(qū)動輪的優(yōu)勢主要表現(xiàn)在以下幾個方面:
ROS 為機器人的控制軟件提供了靈活的模塊化框架,可以通過組合、創(chuàng)建、測試和維護模塊化化的算法和功能單元來快速配置機器人,實現(xiàn)快速建模和原型制作。此外,ROS 還提供了強大的工具鏈,如 rviz、rqt、rosbag 等,方便機器人的開發(fā)者進行數(shù)據(jù)記錄、查看、發(fā)布、訂閱等工作。
ROS 有完整的軟件包組和相應的網(wǎng)絡支持,經(jīng)過持續(xù)的開發(fā)和維護,其代碼已被廣泛評測和測試,具有穩(wěn)定性和可靠性。而 ROS 還提供了良好的文檔和代碼示例,使得新手很容易學習和上手。
ROS 軟件生態(tài)圈非常活躍,有大量的開發(fā)者和用戶,并有一個完備的軟件倉庫,因此 ROS 的應用非常廣泛。ROS 的社區(qū)提供了廣泛的支持和貢獻,使得新的驅(qū)動輪控制和應用場景得以快速地被開發(fā)和推廣。
ROS 中的驅(qū)動輪受到外部環(huán)境干擾較大的情況下,其控制會受到一定程度的影響,尤其是在步行機器人和無人汽車的大量控制可變的情況下,很容易累積誤差。此外,在控制參數(shù)設置中,也需要根據(jù)驅(qū)動輪的實際情況和環(huán)境不斷調(diào)整同步、增益、控制周期等參數(shù),以保持良好的控制效果。
ROS 中驅(qū)動輪是機器人控制系統(tǒng)的重要組成部分,有著極其廣泛的應用領域。ROS 具有靈活易用、穩(wěn)定可靠、社區(qū)活躍等優(yōu)勢,可以幫助機器人開發(fā)者輕松實現(xiàn)對驅(qū)動輪的控制。但也要注意驅(qū)動輪在外部環(huán)境干擾等因素下易受誤差影響的問題,并需要針對具體驅(qū)動輪的情況進行合理的參數(shù)調(diào)整。
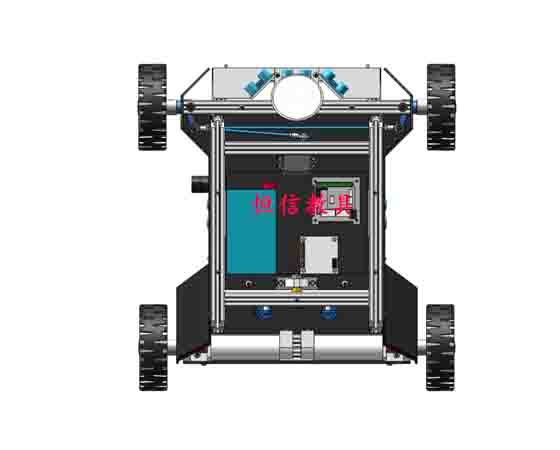
以上內(nèi)容就是介紹ros中驅(qū)動輪:http://tea818.com/qa-ld/1390.html,希望對訂購ROS機器人底盤四驅(qū)線控小車的朋們有所幫助,可能會出現(xiàn)介紹錯誤,看到請馬上聯(lián)系我們改正,想了解其中更多內(nèi)容以及行情資訊,歡迎收藏本站,也可電話聯(lián)系我們索要設備的功能參數(shù)等,或者直接實地考察,也可電話微信溝通訂購等!
添加微信
可微信咨詢
全國免費服務熱線
134-5512-6350
相關評論
來自[廣東]客戶反饋
廠家設備不錯,做工細致,外觀漂亮,超贊,老板人很好吆。
來自[青島]客戶反饋
設備收到很滿意,真的是超級好的廠家,解答疑問不厭其煩,細致認真,關鍵是老師同學都很喜歡,以后還會繼續(xù)合作。
來自[濰坊]客戶反饋
設備收到很滿意,真的是超級好的廠家,解答疑問不厭其煩,細致認真,關鍵是老師同學都很喜歡,以后還會繼續(xù)合作。
來自[濟南]客戶反饋
使用之后,老師們都說功能全面,學生對它的功能也特別感興趣,都比較喜歡去操作,學習興趣也比較足,確實不錯,值得推薦。